
一种空间六自由度微动平台
- 公开号
CN209425389U
- 申请号
CN201822185058.4.0
- 专利类型
实用新型
- 申请日期
2018-12-25
- 授权日期
2019-09-24
- IPC主分类号
手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手
摘 要
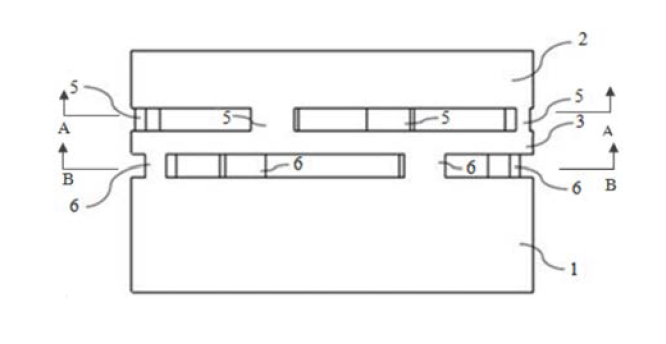
本实用新型公开了一种空间六自由度微动平台,包括静平台,动平台,柔性铰链和薄片驱动器;静平台和动平台之间设置有环形柔性铰链;环形柔性铰链的上端面上竖直设置有上层柔性铰链;环形柔性铰链的下端面上竖直设置有下层柔性铰链;环形柔性铰链内设置有十字形柔性铰链;十字形柔性铰链的四个支脚的下端面均设置有压电薄片驱动器A;十字形柔性铰链的四个支脚的相同方向的侧面上均设置有压电薄片驱动器B;十字形柔性铰链的一个支脚的另外一侧面设置有压电薄片驱动器C;与压电薄片驱动器C相邻的一个支脚的另外一侧面设置有压电薄片驱动器D。本实用新型结构紧凑,体积较小;采用压电薄片驱动器驱动,具有双向运动控制能力;实现空间六自由度调整。
当前申请(专利权)人
西交利物浦大学
发明人
陈敏 | 王忆如 | 张顺琦 | 吴斌 | 朱林
标题
技术功效
[0009]本实用新型的优点是:
[0010]1.设计结构紧凑,体积较小;
