
基于运动信息的单目相机获取深度信息的方法
- 公开号
CN105184784B
- 申请号
CN201510535760.7.0
- 专利类型
授权发明
- 申请日期
2015-08-28
- 授权日期
2018-01-16
- IPC主分类号
计算;推算或计数
摘 要
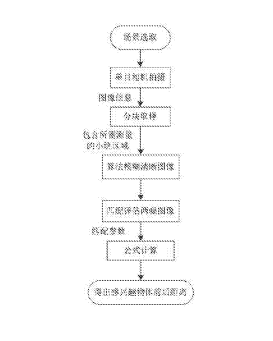
本发明公开了一种基于运动信息的单目相机获取深度信息的方法,包括以下步骤:相机在运动过程中拍摄不同清晰度的至少两幅图像,所述图像的光照条件相同;对拍摄的图像进行分块处理,选出所需计算的小块图像;将较清晰的图像中的各个块按照不同的模糊矩阵H进行滤波处理,并通过匹配较模糊的图像找出相似程度最高的模糊矩阵;通过相似程度最高的模糊矩阵,结合相机成像原理,获取该块的深度信息,重复上一步骤获得整个场景的深度信息。该方法通过简单的算法计算将图像中物体的前后距离计算出来,既适用于近距离测量也适用于远距离测量。
当前申请(专利权)人
西交利物浦大学
发明人
罗天明 | 蒋琛儒 | 程飞
技术功效
[0015]与现有技术相比,本发明的优点是:
[0016]1.通过一台相机拍摄图像,可以通过不同的快门速度在相机运动中获取清晰图像和模糊图像,可以在相机运动过程中持续获取深度。
[0017]2.通过简单模糊及匹配算法可以迅速得出计算深度信息所需参数,并且仅仅基于相机成像原理来计算,降低了算法的计算复杂度及算法的时间复杂度。
[0018]3.降低了实现深度数据获取所需的硬件成本,并且适用于近距离及远距离的深度数据获取。
[0019]4. 本发明将模糊图像也可以用于计算深度信息,而在双目相机获取深度信息方法中则必须保证图像都是清晰的,模糊图像则作为无效信息处理。
